









Fuel Removal from Unit 4 Spent Fuel Pool
Robots Used for Surveys
-

PCV Investigation Device (Underwater ROV)
[IRID (Developed by: Toshiba)]
PCV periphery- Robot used for internal investigations into the Unit 3 PCV.
(Diameter: Approx. 13 cm × Length: Approx. 30 cm) - Moved through the water inside the PCV to take pictures inside.
- Robot used for internal investigations into the Unit 3 PCV.
-
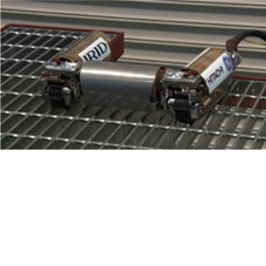
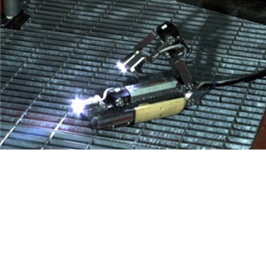
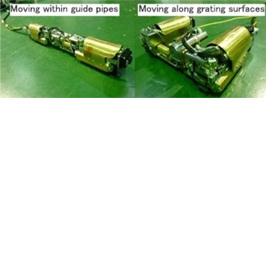
Primary Containment Vessel Internal Survey Equipment (PMORPH)
[IRID (Developed by: Hitachi GE)]
PCV periphery- Implemented an investigation into the underground level inside the Unit 1 PCV.
- The PCV investigation device (a variable shape robot) was modified to accommodate the requirements of this underground survey.
- For guide pipe travel (Length: Approx. 70 cm × Width: Approx. 7 cm × Height: Approx. 9.5 cm)
- For grating travel (Length: Approx. 32 cm × Width: Approx. 29 cm × Height: Approx. 9.5 cm)
- The sensor unit combining the camera, LED and dosimeter is lowered to the underground floor through a gap in the grating to perform measurements.
*"PMORPH" is a portmanteau combining "primary containment vessel (PCV)" and "metamorphose", as in the morphological change seen in insects.
-
Primary Containment Vessel Internal Survey Equipment
(Common name: scorpion-shaped robot)[IRID (Developed by: Toshiba)]
PCV periphery- Miniature robot used for internal investigations into the Unit 2 PCV.
(Length: Approx. 59 cm × Width: Approx. 9 cm × Height: Approx. 9 cm) - This robot forms a rodlike shape to travel down narrow pipes to enter the containment vessel, while internally its rear end curls up like a scorpion to film using its front and rear cameras.
- Miniature robot used for internal investigations into the Unit 2 PCV.
-

Small Investigation Device
[developed by TEPCO Holdings]
Outside PCV periphery- It investigated the conditions of the PCV equipment hatch (narrow space).
-
Device to Inspect Interior of Primary Containment Vessel (Shape-changing Robot)
[IRID (developed by Hitachi GE)]
PCV periphery- It investigates along the 1st floor grating surfaces in the primary containment vessel.
- To reach the inside of the containment vessel, it takes on a tubular form to traverse a narrow pipe and expands into a U shape to achieve stability when maneuvering.
- developed in PCV Interior Inspection Project*3
-

Kanicrane
[developed by Hitachi GE]
Outside PCV periphery- It investigates radiation source for the upper part on the 1st floor of the reactor buildings.
- developed in Remote Decontamination Project*4
-

Sakura
[IRID (developed by NEDO, Chiba Institute of Technology, Hitachi GE]
Outside PCV periphery- It investigates radiation source on the 2nd and 3rd floors of the reactor buildings.
- developed in Remote Decontamination Project*4
-

Investigation device for the upper part of the suppression chamber
[IRID (developed by Hitachi GE)]
PCV periphery- It investigates the upper part of the suppression chamber and the wall surface of the torus room using a camera or a sonar.
- developed in Leakage Point inside Reactor Containment Vessel Identification Project*6
-
Investigation device for the torus room wall
[IRID (developed by Hitachi GE)]
PCV periphery- It investigates the wall penetration between the reactor building and the turbine building.
- developed in Leakage Point inside Reactor Containment Vessel Identification Project*6
-

Rosemary
[IRID (developed by Chiba Institute of Technology, Hitachi GE]
Outside PCV periphery- It investigates radiation source on the 2nd and 3rd floors of the reactor buildings.
- developed in Remote Decontamination Project*4
-

Investigation device of the outer lower surface of the suppression chamber (SC-ROV)
[IRID (developed by Toshiba)]
PCV periphery- It investigates the outer lower surfece of the suppression chamber.
- developed in Leakage Point inside Reactor Containment Vessel Identification Project*6
- 2014.10.30 Development Result (Japanese)(11.2MB)
- 2014.9.30 Survey Result
- 2014.4.24 Working Summary (Japanese)(971KB)
- 2014.2.27 Result Application (Japanese)(521KB)
- 2013.10.31 Verification Test (Japanese)(2.09MB)
- 2013.9.26 Verification Test (Japanese)(270KB)
- 2013.9.26 Verification Test (Japanese)(883KB)
- 2013.6.27 Technology Developent (Japanese)(1.37MB)
-

High-access Investigation Robot
[cooperated*5 by Honda, AIST]
Outside PCV periphery- It is applied to investigate upper and small spaces of the reactor buildings.
-

Water level measuring device for the suppression chamber
[developed by ATOX]
PCV periphery- It investigates the water level inside the suppression chamber.
- developed in Water Level Measuring Robot Project for the suppression chamber*7
-

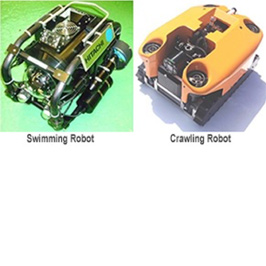
Water Boat
[developed by Hitachi GE]
Outside PCV periphery- It investigates leakage points in the reactor containment vessel.
- developed in Under Water Swimming Robot Project*8
-

Four-leg Walking Robot
[developed by Toshiba]
Outside PCV periphery- It investigates around vent pipes inside the torus room.
-

FRIGO-MA
[cooperated*5 by Mitsubishi Electric TOKKI Systems]
Outside PCV periphery- It is applied to investigate small rooms in the reactor buildings.
-

Warrior
[cooperated*5 by iRobot]
Outside PCV periphery- It is applied to remove obstacles inside the reactor buildings.
- 2014.3.27 Working Result (Japanese)(416KB)
- 2014.1.30 Investigation Result (Japanese)(1.04MB)
- 2014.1.30 Investigation Result (Japanese)(1.25MB)
- 2013.12.26 Investigation Plan (Japanese)(1.24MB)
- 2011.11.22 Working Result
- 2011.11.16 Working Result
- 2011.11.5 Working Result
- 2011.7.2 Working Result
- 2011.6.30 Working Result
-

Quince 1,2,3
[cooperated*5 by Chiba Institute of Technology, Tohoku University, International Recue System Institute]
Outside PCV periphery- It is applied to both investigation and operation of several sites inside the reactor buildings.
- 2013.4.16 Survey Result
- 2013.3.28 Investigation Plan (Japanese)(1.67MB)
- 2012.11.28 Survey Result
- 2012.11.26 Survey Result
- 2012.7.5 Survey Result
- 2012.5.24 Survey Result
- 2012.3.22 Survey Result
- 2012.2.28 Survey Result
- 2011.10.21 Survey Result
- 2011.10.21 Survey Result
- 2011.7.28 Survey Result
- 2011.7.27 Survey Result
- 2011.7.16 Survey Result
- 2011.6.20 Machine Verification
- 2011.4.28 Machine Summary
-

Packbot
[cooperated*5 by iRobot]
Outside PCV periphery- It is applied to investigate the upper floor such as the operation floor, of the reactor buildings.
- 2014.5.29 Investigation Result (Japanese)(941KB)
- 2014.3.27 Working Result(Japanese)(416KB)
- 2014.3.27 Working Summary (Japanese)(141KB)
- 2014.1.30 Investigation Result (Japanese)(1.04MB)
- 2014.1.30 Investigation Result (Japanese)(223KB)
- 2013.12.26 Investigation Result (Japanese)(1.24MB)
- 2013.8.26 Working Result
- 2013.7.25 Investigation Result (Japanese)(273KB)
- 2013.6.27 Investigation Result (Japanese)(458KB)
- 2013.4.26 Investigation Result (Japanese)(289KB)
- 2013.4.26 Investigation Result (Japanese)(275KB)
- 2013.4.16 Survey Result
- 2013.4.9 Survey Result
- 2013.3.28 Investigation Plan (Japanese)(1.67MB)
- 2012.11.28 Survey Result
- 2012.11.26 Survey Summary
- 2012.7.5 Survey Result
- 2012.7.5 Survey Result
- 2012.5.25 Survey Result
- 2011.11.22 Working Result
- 2011.11.16 Working Result
- 2011.11.5 Working Result
- 2011.7.2 Measurement Result
- 2011.6.4 Survey Result
- 2011.5.3 Survey Result
- 2011.4.29 Survey Result
- 2011.4.28 Machine Summary
- 2011.4.27 Survey Result
- 2011.4.20 Survey Result
- 2011.4.19 Survey Result
- 2011.4.17 Survey Result
-

Survey Runner
[cooperated*6 by Topy Industries]
Outside PCV periphery- It is applied to investigate inside the torus room and obtain laser scanning data.
Robots Used for Work
-

Deposit Removal Device
[IRID]
PCV periphery- This is a miniature robot used to remove deposits left along the travel route of self-propelled investigation devices used for internal surveys of the Unit 2 PCV.
- Width and height 9 cm, length 30 cm. Deposits left on CRD rails (device exchange rails) are removed using high pressure water propulsion jets, or pushed off using scrapers (metallic plates).
-

Dry Ice Blast Decontamination Equipment for High Places
[IRID (developed by Toshiba)]
Outside PCV periphery- It decontaminates high places using dry ice blast.
- developed in Remote Decontamination Project*4
-

Equipment to Remove Shielding Blocks (TEMBO)
[IRID (developed by Mitsubishi Heavy Industries)]
Outside PCV periphery- It removes shielding blocks in front of the X-6 penetration.
-

High Pressure Water Decontamination Robot
[IRID (developed by Hitachi GE)]
Outside PCV periphery- It decontaminates using high pressure water, water jet.
- developed in Remote Decontamination Project*4
-
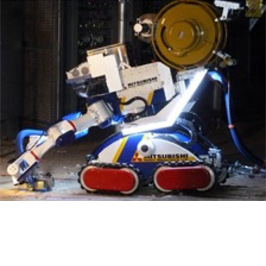
Absorption/blast Decontamination Robot (MEISTeR)
[IRID (developed by Mitsubishi Heavy Industries)]
Outside PCV periphery- It decontaminates using shot blast and also absorbs dust with collecting system.
- developed in Remote Decontamination Project*4
- 2014.8.28 Development Result (Japanese)(3.71MB)
- 2014.6.23 Docontamination Summary
- 2014.3.27 Verification Test (Japanese)(1.71MB)
- 2014.2.7 Machine Verification
- 2014.1.30 Result Application (Japanese)(328KB)
- 2014.1.30 Investigation Result (Japanese)(1.25MB)
- 2014.1.30 Machine Verification (Japanese)(645KB)
- 2014.1.30 Investigation Result (Japanese)(164KB)
- 2013.12.26 Investigation Result (Japanese)(1.52MB)
- 2013.12.26 Decontamination Summary (Japanese)(1.24MB)
-
Husqvarna (DXR-140 remodeling)
[cooperated*5 by Toshiba]
Outside PCV periphery- It is applied to decontaminate the middle part on the 1st floor of the reactor buildings.
-

Robot equipped with laser scanning
[cooperated*5 by Hitachi GE]
Outside PCV periphery- It is applied to acquire 3D laser scanning data inside the reactor buildings.
-

Raccoon
[cooperated*5 by ATOX]
Outside PCV periphery- It is applied to decontaminate the 1st floor of the reactor buildings.
-

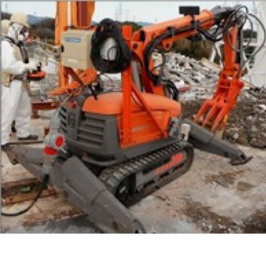
ASTACO-SoRa
[cooperated*5 by Hitachi GE]
Outside PCV periphery- It is applied to remove debris on the 1st floor of the reactor buildings.
-

Dry Ice Blast Decontamination Robot
[IRID (developed by Toshiba)]
Outside PCV periphery- It decontaminates using dry ice blast.
- developed in Remote Decontamination Project*4
- *1:
For Operation: Robots applied to the site for operational purpose, such as environmental improvement or repair
- *2:
For Research: Robots applied to the site for research purpose, such as grasping the site condition
- *3:
PCV Interior Inspection Project = Development of a Technology to Inspect the Interior of the Reactor Primary Containment Vessel
- *4:
Remote Decontamination Project: "The Development of Remote Decontamination Technology inside the Reactor Buildings" for "The Individual Research and Development Project for the Decommissioning of TEPCO's Fukushima Daiichi Nuclear Power Station Units 1-4" (by the Promotion Council toward the Decommissioning of TEPCO's Fukushima Daiichi Nuclear Power Station in the Nuclear Emergency Response Headquarters, June 27, 2013)
- *5:
Cooperate: Robots are applied to site operations after coordinating with both domestic and international corporations or organizations. They are;
- supplied for free or lent as a part of operational support.
- developed as a joint development.
- supplied to implement site operations.
- *6:
Leakage Point inside Reactor Containment Vessel Identification Project: "The Development of Survey and Repair (water stopping) Technology to Fill Water into the Reactor Containment Vessel" for "The Individual Research and Development Project for the Decommissioning of TEPCO's Fukushima Daiichi Nuclear Power Station Units 1-4" (by the Promotion Council toward the Decommissioning of TEPCO's Fukushima Daiichi Nuclear Power Station in the Nuclear Emergency Response Headquarters, June 27, 2013)
- *7:
Water Level Measuring Robot Project for the suppression chamber: Base Establishment Project for the Related Technologies of Accident Response for Nuclear Reactors to Generate Electricity in FY2014 (Remote Fundamental Technology Development to Measure Water Level inside cylindrical vessels)
- *8:
Swimming Robot Project: Base Establishment Project for the Related Technologies of Accident Response for Nuclear Reactors to Generate Electricity in FY2014 (Technology Development of Swimming Survey Robot to Advance Remote Technology Basis)