廃炉プロジェクト
> 基本姿勢
> 技術開発
> ロボット
> 主に地下階で活用実績のあるロボット
主に地下階で活用実績のあるロボット
※これまでに当社ホームページ「写真動画集」に掲載された順で、整理・掲載しております。
|
原子炉格納容器調査装置(水中ROV)
[IRID (開発元:東芝)]  |
サプレッションチェンバー下部外面調査装置
(SC-ROV)
[IRID (開発元:東芝)] 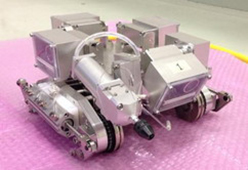 |
- ○3号機原子炉格納容器の内部調査に使用したロボット。
(直径:約13cm×長さ:約30cm)
- ○原子炉格納容器内の水中を泳いで移動し、内部を撮影。
関連する当社HP公表情報
|
- ○サプレッションチェンバー下部外面の調査を実施
- ○格納容器漏えい箇所特定プロジェクト※3の中で開発
関連する当社HP公表情報
|
|
トーラス室壁面調査装置 水中遊泳ロボット(げんごROV)・床面走行ロボット(トライダイバー)
[IRID (開発元:日立GE)] 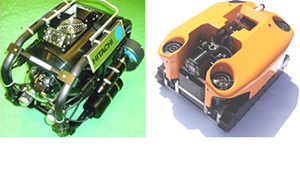 |
サプレッションチェンバー上部調査装置
(テレランナー)
[IRID (開発元:日立GE)]  |
- ○原子炉建屋とタービン建屋の壁面貫通部の調査を実施
- ○格納容器漏えい箇所特定プロジェクト※3の中で開発
関連する当社HP公表情報
|
- ○サプレッションチェンバー上部およびトーラス室壁面(カメラ・ソナー)の調査を実施
- ○格納容器漏えい箇所特定プロジェクト※3の中で開発
関連する当社HP公表情報
|
|
サプレッションチェンバー内水位測定装置
[開発元:アトックス]  |
水上ボート
[開発元:日立GE]  |
- ○サプレッションチェンバー内の水位測定を実施
- ○サプレッションチェンバー内水位測定ロボットプロジェクト※4の中で開発
関連する当社HP公表情報
|
- ○格納容器からの漏えい状況を確認
- ○水中遊泳ロボットプロジェクト※5の中で開発
関連する当社HP公表情報
|
|
4足歩行ロボット
[開発元:東芝]  |
Survey Runner(サーベイランナー)
[協力※6:トピー工業]  |
関連する当社HP公表情報
|
- ○トーラス室調査やレーザースキャンデータ取得などに活用
関連する当社HP公表情報
|
- ※1:作業用途=主に環境改善・補修等、作業用途での現場投入実績があるロボット
- ※2:調査用途=主に現場状況の把握等、調査用途での現場投入実績があるロボット
- ※3:格納容器漏えい箇所特定プロジェクト=「「東京電力福島第一原子力発電所1~4 号機の廃止措置等に向けた個別研究開発プロジェクト」(平成25年6月27日 原子力災害対策本部 東京電力福島第一原子力発電所廃炉対策推進会)の「原子炉格納容器水張りに向けた調査・補修(止水)技術の開発」のうち調査技術の開発
- ※4:サプレッションチェンバー内水位測定ロボットプロジェクト=平成24年度発電用原子炉等事故対応関連技術基盤整備事業(円筒容器内水位測定のための遠隔基盤技術の開発)
- ※5:水中遊泳ロボットプロジェクト=平成24年度発電用原子炉等事故対応関連技術基盤整備事業(遠隔技術基盤の高度化に向けた遊泳調査ロボットの技術開発)
- ※6:協力=現場導入に向けて各企業および機関と調整をしたうえで、ロボットを現場作業に活用しています。
・無償での機器のご提供や貸与によるご支援
・開発段階からの機器開発のご協力
・現場作業の中での機器のご提案