遠隔ロボットを駆使した2つの廃炉プロジェクトが日本機械学会の「貢献表彰」を受賞
2022/02/21

福島第一原子力発電所における遠隔ロボット技術を駆使した廃炉作業が、日本機械学会動力エネルギーシステム部門の「貢献表彰」を受賞しました。福島県双葉郡大熊町に本社を置く地元企業のエイブルによる1・2号機共用排気筒の上部解体工事、東芝エネルギーシステムズ(以下、「東芝」)による3号機使用済燃料プールからの燃料取り出し作業が高く評価された結果で、いずれも目的に応じた特殊な遠隔ロボットを開発、それを活用してプロジェクトを完遂することができました。そこで今回は、両社と東京電力ホールディングスの担当者に2つのプロジェクトについて話を聞きました。
高所での作業、風の影響をいかに克服するか
株式会社エイブル
技術開発本部
技術開発部長
佐藤 哲男
東日本大震災前年の2008年入社後から同発電所の仕事に携わり、震災直後も緊急工事に従事。2016年から1・2号機共用排気筒の上部解体工事を担当している。
株式会社エイブル
技術開発本部 技術開発部
第一技術開発グループGL
兼 改善推進室 情報システムグループ
課長
目黒 英二
制御・通信などの業務を経て、2017年から1・2号機共用排気筒の上部解体工事を担当している。

エイブル・佐藤「今回、エイブルが担ったのは、原子炉建屋などの排気に使われていた高さ120メートルの1・2号機共用排気筒の上半分の解体です。耐震基準を充分に満たしていましたが、事故の影響により損傷している箇所が見つかり、地震による倒壊リスクを減らすためにこの作業は必要でした。
この種の排気筒の解体では通常、現場に作業員が入りダルマ落とし式に、下から順々に切断・取り外していきます。しかし、高線量の現場への立ち入りは困難であり、こうした手法は使えません。そこで、切断などを行う装置を大型クレーンで吊り下げ、筒状の煙突とそれを囲む鉄塔を上から少しずつ輪切りにして解体することにしました。この装置を遠隔操作するというやり方です。
私はこの遠隔ロボットの設計から製造、工事の計画、施工まで関わりました。装置開発を始めたのは2016年夏。数万点の汎用部品をいかに組み合わせるかが、設計のポイントでした。装置を製造してからは当社の事業所内にモックアップ(実物大の模型)を用意して、本番に備えた準備を開始。その後、2019年8月に実際の解体に取り掛かり、2020年4月に上部解体を完了しました」

解体装置をクレーンで吊り下げ、ロボットを遠隔で操作して各部位を切断する方法を採用
エイブル・目黒「私は通信や制御系の設計を担当しました。遠隔ロボット操作のために独自でWi-Fi環境を構築したのですが、施工中に、途切れたり必要な通信速度が出なかったりすることがありました。周波数変更などを改善しながら対応しましたが、正直かなり苦労しました」
エイブル・佐藤「高さ60メートルから120メートルまでの上半分を23ブロックに切断して解体したのですが、施工開始から5カ月で4ブロックしか降ろせませんでした。高所なので、風による揺れが問題でした。モックアップのときは問題なく切断できたのですが、煙突が揺れると切った断面でチップソー刃が切断面に挟まり噛みこんでしまいました。
そこで、切断方法を再検討しました。煙突を輪切りにしたときの1周は10メートル。当初は10メートルをまっすぐに切っていたのですが、途中からミシン目状に一部を残して切断するようにしたのです。他にも様々な改善や工夫を施し、施工のスピードもアップ。後半4カ月で残り19ブロックを解体し、無事に完了させることができました」
手探りだった遠隔ロボットでの燃料の取り出し
東芝エネルギーシステムズ株式会社
磯子エンジニアリングセンター
原子力機械システム設計部
機械システム設計第三グループ
エキスパート
諏訪薗 司
制御棒駆動系などの担当を経て、2011年から同発電所の仕事に携わる。3号機使用済燃料プールからの燃料取り出し作業は、2015年から担当している。
東芝エネルギーシステムズ株式会社
パワーシステム事業部
原子力福島復旧・サイクル技術部
プロジェクト第三グループ
スペシャリスト
村越 将貴
ノートパソコンの設計・企画などの業務を経て、2016年から3号機使用済燃料プールからの燃料取り出し作業を担当している。

東京電力ホールディングス株式会社
福島第一廃炉推進カンパニー
福島第一原子力発電所
プール燃料取り出しプログラム部
5・6号機燃料取り出しPJグループ
三上 諒
2011年入社後、柏崎刈羽原子力発電所にて燃料管理業務を経て、2015年より福島第一原子力発電所の廃炉作業に従事。2017年から遠隔ロボット技術を駆使した廃炉作業を担当している。

東芝・諏訪薗「東芝エネルギーシステムズはこれまでも廃炉作業に関する様々な遠隔操作ロボットの設計・製造を担当してきました。その中で私たちが携わったのは、3号機の使用済燃料プールに残された566本の燃料の取り出しで、廃炉プロセスを進める上で、必須のプロジェクトです。2011年後半、燃料を取り出すための装置の設計が始まりました。私自身は、2015年からこのプロジェクトに参加し、燃料を取り出す前段階の瓦礫取り出しから携わっています。当初80名近くの体制で設計を進めましたが、燃料取り出し作業に入るころには海外のメンバーも含む総勢200名近くが関わる規模になりました。当時は燃料プールの状態が分からない中で、『多分こうなっているだろう』と推測しつつ、手探りで設計を進めました。例えば、プールに瓦礫が落ちていることが推測されるので、それを取り除くためのロボットアームを取り付けようという具合です。また、短期開発が求められたので、既存の製品や部品を組み合わせてつくる方針でしたが、門型クレーンで吊り下げる方式のロボットは新たに開発が必要でした。40~50台のカメラの映像を見ながらこれを遠隔操作し、燃料プール内の瓦礫除去や燃料取り出しを行いました」

燃料取り出し作業の概要。遠隔操作で使用済燃料プールから燃料を取り出し、構内用輸送容器に入れて敷地内の共用プールへ輸送する
東芝・村越「ロボットは米国で組み立てた後、東芝エネルギーシステムズの京浜事業所で訓練を行いました。訓練で気付いた50弱の改善を行い、福島第一原子力発電所に運びこみました。3号機の燃料取り出し作業を開始してからは、インバーターの停止やコネクタの断線など装置の様々なトラブルに見舞われました。一番大変だったのは、トラブルの原因究明です。福島第一原子力発電所での放射線環境下ではいったん現場にロボットを据え付けると、簡単に見に行くことができませんからね」

完成した燃料取扱機は大型クレーンで吊り上げられ、巨大な円筒状の燃料取り出し用カバー内に設定された(2017年11月撮影)
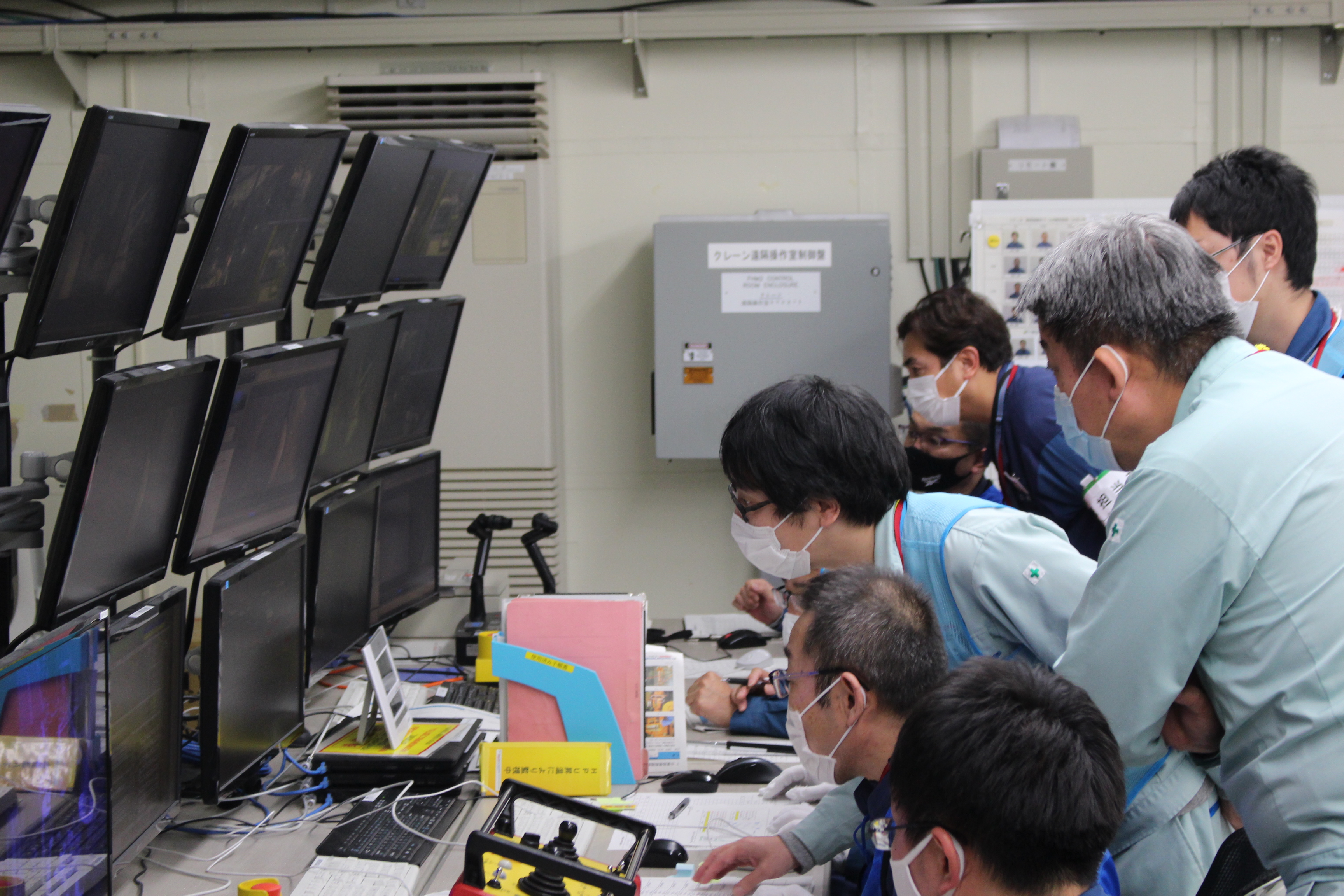
遠隔操作室の様子。カメラ映像を頼りにリモート操作で作業が行われた

カメラ映像。使用済燃料プールから燃料を釣り上げる様子
TEPCO・三上「私は主に燃料移動を担当しました。取り出した燃料をキャスクと呼ばれる輸送用容器に入れて、敷地内の仮保管設備である共用プール建屋まで運ぶという仕事です。燃料の取り出しでトラブルが起きると、次工程にあたる燃料移動にも影響します。場合によっては、工程を変更して協力会社への作業依頼内容が変わることもあります。協力会社の方々に柔軟に対応していただけたこともあり、2019年4月に開始した3号機の燃料移動は、2021年2月に無事完了しました。
このプロジェクトを終えた現在、私が取り組んでいるのは、使用済燃料貯蔵用のキャスクを仮保管する設備の拡張です。3号機の燃料については仮保管設備に移動させましたが、2022年には5・6号機の燃料の取り出しが始まる予定で、1・2号機でも同様のプロジェクトが控えています。そのため、いまのうちから、仮保管設備の拡張を進めておく必要があります」
東芝・村越「3号機の燃料取り出しは完了しましたが、プール内には制御棒など高線量のものが残っています。私は現在、それらを取り出すプロジェクトに携わっています。引き続き、同じ遠隔操作ロボットを用いる予定なので、いままでの経験を生かして進めたいと思っています」
「貢献表彰」を受賞、廃炉と地元復興への思いも高まる
東芝・諏訪薗「受賞の知らせを聞いてとても驚きましたし、仲間と一緒に喜びを分かち合いました。震災から10年が経過し、少しずつではありますが目に見える形で廃炉作業が進んでいることに感慨を覚えます。このプロジェクトは国内だけでなく、世界からも注目されています。そんなプロジェクトに参加していると思うと、やりがいを感じます。」
エイブル・佐藤「私は生まれも育ちも浪江町、目黒はいわき市の出身です。エイブル社員のうち地元出身者は6~7割。地域の人たちと話すと、『廃炉プロジェクトがどんなものか、よく分からない』といった声を聞くこともあります。技術的に分かりにくい面もあって、イメージしにくいのでしょう。しかし、今回私たちが解体を手掛けた排気筒は、敷地外の遠い場所からもよく見える設備でした。解体作業が進むにつれて、敷地外からはだんだん排気筒の姿が見えなくなることで地元の人たちに対して、廃炉の進捗を視覚的に示すことができたのではないでしょうか。実際、作業が停滞している時期は『何をやっているんだ』と言われましたし、うまくいっているときは『よくやった』と周囲から言われたものです。多くのみなさんが注目するプロジェクトに参加できたのはうれしいことですし、これからも自分の地元の復興のために、やれることは何でもしたいと思っています」
