Decommissioning Plan of Fukushima Daiichi Nuclear Power
> Basic Principles
> Technology & Knowledge
> Robot Technology
> basement floor
About this website
Robots being applied mainly on the basement floor of the reactor building
|
Investigation device of the outer lower surface of the suppression chamber (SC-ROV)
[IRID (developed by Toshiba)]
|
Investigation device for the torus room wall
[IRID (developed by Hitachi GE)]
|
- It investigates the outer lower surfece of the suppression chamber.
- developed in Leakage Point inside Reactor Containment Vessel Identification Project*3
Related official information
|
- It investigates the wall penetration between the reactor building and the turbine building.
- developed in Leakage Point inside Reactor Containment Vessel Identification Project*3
Related official information
|
|
Investigation device for the upper part of the suppression chamber
[IRID (developed by Hitachi GE)]
|
Water level measuring device for the suppression chamber
[developed by ATOX]
|
- It investigates the upper part of the suppression chamber and the wall surface of the torus room using a camera or a sonar.
- developed in Leakage Point inside Reactor Containment Vessel Identification Project*3
Related official information
|
- It investigates the water level inside the suppression chamber.
- developed in Water Level Measuring Robot Project for the suppression chamber*4
Related official information
|
|
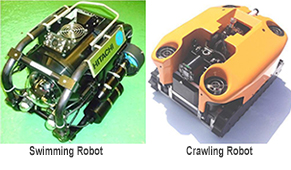
Water Boat
[developed by Hitachi GE]
|
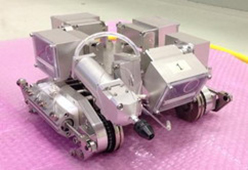
Four-leg Walking Robot
[developed by Toshiba]
|
- It investigates leakage points in the reactor containment vessel.
- developed in Under Water Swimming Robot Project*5
Related official information
|
- It investigates around vent pipes inside the torus room.
Related official information
|
|
Survey Runner
[cooperated*6 by Topy Industries]
|
|
- It is applied to investigate inside the torus room and obtain laser scanning data.
Related official information
|
|
[Notes]
- *1:For Operation: Robots applied to the site for operational purpose, such as environmental improvement or repair
- *2:For Research: Robots applied to the site for research purpose, such as grasping the site condition
- *3: Leakage Point inside Reactor Containment Vessel Identification Project: "The Development of Survey and Repair (water stopping) Technology to Fill Water into the Reactor Containment Vessel" for "The Individual Research and Development Project for the Decommissioning of TEPCO's Fukushima Daiichi Nuclear Power Station Units 1-4" (by the Promotion Council toward the Decommissioning of TEPCO's Fukushima Daiichi Nuclear Power Station in the Nuclear Emergency Response Headquarters, June 27, 2013)
- *4: Water Level Measuring Robot Project for the suppression chamber: Base Establishment Project for the Related Technologies of Accident Response for Nuclear Reactors to Generate Electricity in FY2014 (Remote Fundamental Technology Development to Measure Water Level inside cylindrical vessels)
- *5: Swimming Robot Project: Base Establishment Project for the Related Technologies of Accident Response for Nuclear Reactors to Generate Electricity in FY2014 (Technology Development of Swimming Survey Robot to Advance Remote Technology Basis)
- *6: Cooperate: Robots are applied to site operations after coordinating with both domestic and international corporations or organizations. They are;
・supplied for free or lent as a part of operational support.
・developed as a joint development.
・supplied to implement site operations.

















 *1
*1  *2
*2